Applications and Videos
With CrazyChoir, you can easily run your experiments on teams of cooperating Crazyflie. We hope these videos help you understand and utilize the package effectively. If you have any further questions or need assistance, please don’t hesitate to reach out.
Now, let’s dive into these implementations and explore the boundless possibilities!
Trajectory Tracking & Pickup-and-Delivery

Watch this video to see: i) a Crazyflie tracking a hand-written trajectory drawn on our GUI; ii) a fleet of Crazyflies that solves a Pickup-and-delivery vehicle routing problem via distributed optimization.
You can reproduce the first part of the video on your own! Follow the installation procedure here and run
source install/setup.bash
ros2 launch crazychoir_examples tracking_webots.launch.py
Instead, if you are ready to fly, try this
ros2 launch crazychoir_examples tracking_vicon.launch.py
The pickup-and-delivery example instead is based on a distributed resource allocation algorithm, that allows Crazyflies to self-assign the tasks by communicating with neighboring robots and then move toward the designated locations. If you are interested, take a look at the accompaining paper.
Bearing-based Formation Control

In this video, you’ll witness an example of formation control using CrazyChoir. Multiple nano-quadrotors cooperate together to keep the formation tight, demonstrating how the package facilitates decentralized tasks.
If you want to run this experiment type in your terminal this line
ros2 launch crazychoir_examples formation_webots.launch.py
Cooperative Robotic Surveillance
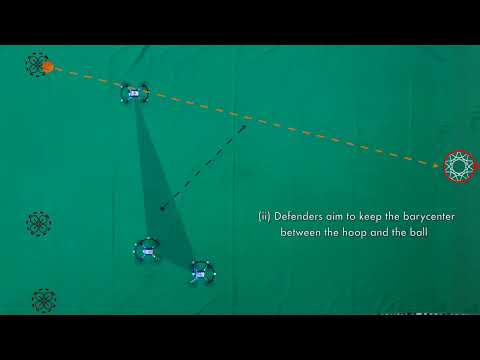
This video shows three nano quadrotors simulate a basketball match against three virtual, attacking players. The defensive strategy, which handles the online changes in the attacking team behavior, is performed according to the proposed distributed optimization scheme. The whole experimet was handled by CrazyChoir! If you are interested, take a look at the accompaining paper, presented at IEEE ICRA 2023.